

KST Weather Control Module for Zero Density’s RealityHub
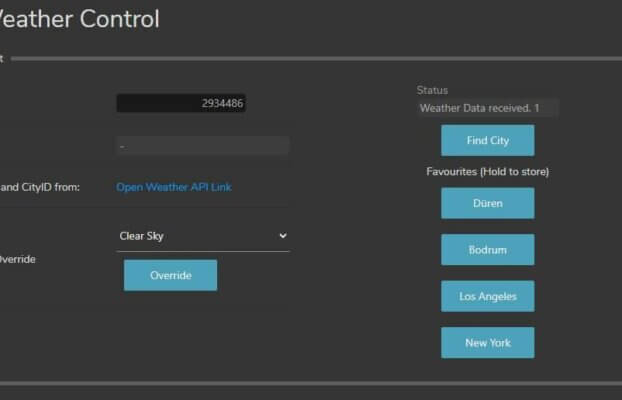
21. March 2023The KST development team has recently completed the “KST Weather Control Module”. It is an interface for Zero Density’s RealityHub and can be integrated via API. The weather module automatically loads the current weather of the city selected in the...

ISE 2023 – Complete IP studio within a few days?
7. February 2023Go. KST Moschkau implemented it as a partner of Panasonic for their ISE booth in Barcelona. During the AV trade fair ISE in Barcelona, Panasonic showed the current line-up of Panasonic on this topic with a complete IP studio at...

IBC 2022 – Virtual studio production automation
8. September 2022At the Zero Density booth, KST Moschkau showed the extent to which productions in virtual studios can be automated with Reality, CamBot systems and Kairos. As a partner at the Zero Density booth, the KST CamBot team gave deep insights...